ROBORDER aims at developing and demonstrating a fully-functional autonomous border surveillance system with unmanned mobile robots including aerial, water surface, underwater and ground vehicles which will incorporate multimodal sensors as part of an interoperable network. Our intention is to implement a heterogenous robot system and enhance it with detection capabilities for early identification of criminal activities at border and coastal areas along with marine pollution events.
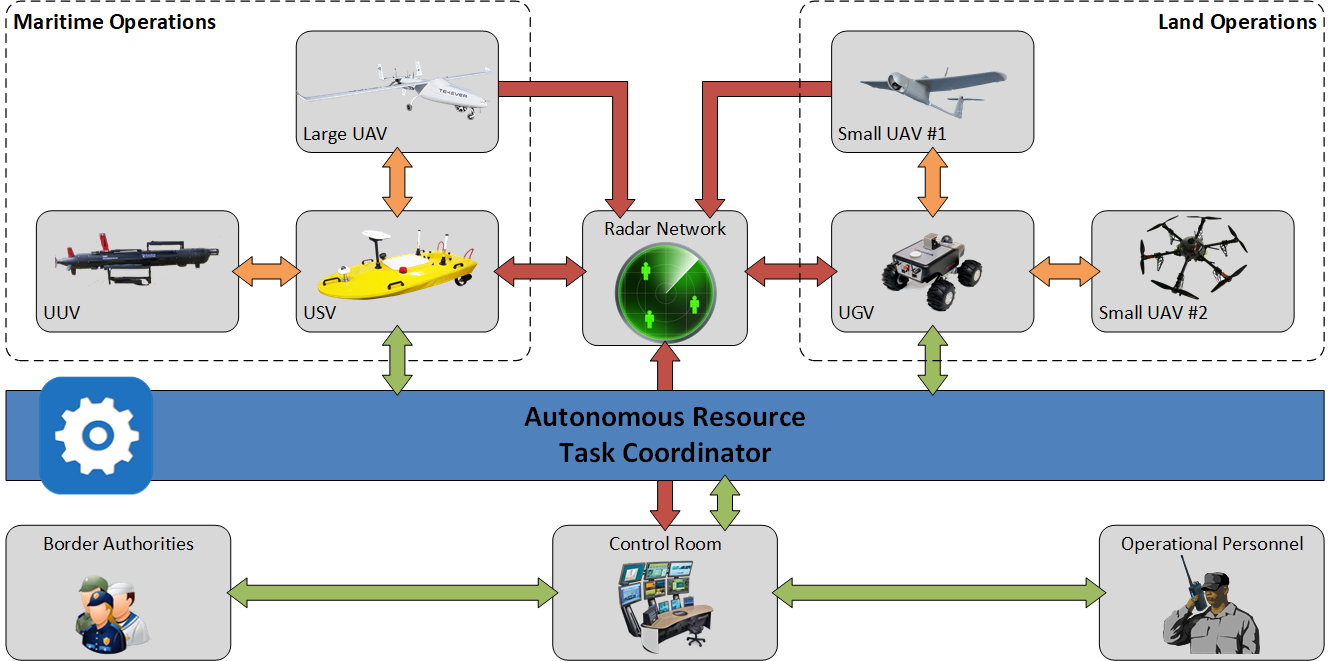
The main objective of ROBORDER is to develop a fully-functional autonomous border surveillance system with unmanned mobile robots including aerial, water surface, underwater and ground vehicles (UAV1, USV, UUV and UGV), capable of functioning both as standalone and in swarms, and incorporate multimodal sensors as part of an interoperable network. The system will be equipped with adaptable sensing and robotic technologies that can operate in a wide range of operational and environmental settings. To provide a complete and detailed situational awareness picture that supports highly efficient operations, the network of sensors will include enhanced static networked sensors such as border surveillance radars, as well as mobile sensors customised and installed on the vehicles. These will include: (i) passive radars that can extend the capabilities of the existing border surveillance radars, (ii) passive RF-signal sensing devices to intercept emission sources that are present in area, enrich the overall situational awareness picture with this information, allowing for further characterizing the nature and behaviour of entities in the picture, and detecting unauthorized signal sources and (iii) other mobile sensors like thermal cameras (infra-red), optical cameras and more . To succeed in the implementation of an operational solution, a number of supplementary technologies will also be applied enabling the establishment of robust communication links between the command and control unit and the heterogeneous robots. On top of this, detection capabilities for early identification of criminal activities and hazardous incidents will be developed. This information will be forwarded to the command and control unit that will enable the integration of large volumes of heterogeneous sensor data and the provision of a quick overview of the situation at a glance to the operators, supporting them in their decisions. Additional command and control functionalities will allow for the translation of the intention of the operators into remote actions, automatic selection of the most appropriate composition of hardware (robots, sensors and communication links) for each given situation and easy deployment and operation of the fleets of heterogeneous robots and sensors.
ROBORDER Pilot Use Case
The developed border surveillance technologies and ROBORDER platform will be tested in three main pilot use cases, consisting of several scenarios covering multiple situations of violations. In each evaluation cycle, three different use cases will be tested in different terrains, in order to exhibit the wide applicability of ROBORDER over different scenarios.
1st pilot use case - Early identification and tracking of illegal activities: To provide a complete and detailed situational awareness in border territories, multiple scenarios will be executed. (i) Detecting unauthorized sea border crossing: The use case involves the monitoring of sea passages and islets in the Greek archipelago. Accumulated data from supervision devices will be processed along with information coming from sensors like passive radars and optical cameras mounted on a swarm of robots. (ii) Detecting unauthorised land border crossing and signals from trespassers: The system will be deployed at the Bulgarian-Turkish borders in order to track and monitor illegal activities. Specialized sensors will be able to detect the emissions coming from microwave devices (cell phones etc.) and so possible human activities could be recognized. (iii) Detecting unauthorised land border crossing: The developed autonomous systems will allow to patrol hardly accessible areas (tested on Hungarian territories) to optimize surveillance and control situation. Multiple UAVs and UGVs will be exploited for collecting relevant information in an early phase and properly inform the operational personnel. (iv) Tracking high-tech smugglers: The ROBORDER technologies will be used to track and recognize smuggling activities in order to prevent the transportation of illicit products across the Estonian-Russian borders. (v) Detecting the terrorist attack coming through cross border: Based on intelligence information about a possible action of a hostile organization, the system will be deployed on Romanian coastal areas and tested in detecting possible explosive devices. (vi) Early and effective identification of passive boats moving offshore: The Italian port authorities will deploy the system to investigate a possible intruder from closer position to provide a more accurate situation assessment. (vii) Tracking organized crime activity in remote border areas: Law enforcement authorities from Northern Ireland and Republic of Ireland will deploy ROBORDER technologies in order to undertake improved surveillance operations for criminal activities recognition.
2nd pilot use case - Early identification and tracking of illegal communications: Jamming comprises a common border threat and is used by criminals to interfere with authorized wireless communications and mask illegal activities such as drug and weapons smuggling, and human trafficking. The advanced onboard hardware instrumentation will detect the rogue radio-frequency signals in the vicinity and fed the collected data to the corresponding software algorithms. These data will be cross-correlated with onboard cyber and physical sources of information and determine the likelihood of the event being of malicious/illegal origin. This information will be displayed to the human operators at the Estonian Border authority’s headquarters in time to act and thwart this attempt. Countermeasures will be taken such as discarding the messages coming from the hostile source, or adapting the communication network and/or the ROBORDER platform path to the interfering/jamming effect of the hostile emitter.
3rd pilot use case - Detection of pollution and other accidents occurred in the borders: ROBORDER will demonstrate the capability to detect and track pollutants spilled at sea, and to determine key environmental conditions needed for defining the response and for forecasting the fate of the pollutants. As real cases of accidents at sea are luckily rather infrequent, and basically unpredictable, the capability will be tested using a natural phenomenon as a proxy of pollutant spill: a river plume will be detected and tracked by autonomous vehicles and key environmental conditions measured. The river plume case is also relevant, as the possibility of pollutants discharged at sea by rivers in consequence of an accident on land is real.